
23 Oct How do YOU Move: PART 2-Mechanical Implications
By: Paul Oneid
We have all used the expression “I am a machine,” or “that person is a machine.” It is actually quite fitting because when you use those expressions you are referencing a noteworthy performance. The individual’s body performed as if it was meant for that task. As mentioned in Part 1, there are many factors that influence the movement of the human body. In this installment, we are going to discuss the nuts and bolts of the machine: the physical structures. The physical structures that control movement are our muscles! It bears mentioning that muscles attach to the skeleton and act on it through coordinated contractions, which shorten the fibers and create movement. The length of the muscles at the fully lengthened and fully shortened positions (end ranges), the tension held within them and the coordination between muscles acting on a joint all influence ROM.
[wa-wps]
A muscle is comprised of thousands of fibers, and each one of those fibers contains multiple proteins. Each fiber is comprised of many myofibrils, formed by these proteins, or filaments. According to the sliding filament theory, muscles contract when two proteins, actin and myosin, bind and rotate, bringing the ends of each myofibril closer together. When multiple myofibrils shorten, the length of the muscle shortens. This is how a muscle contracts.
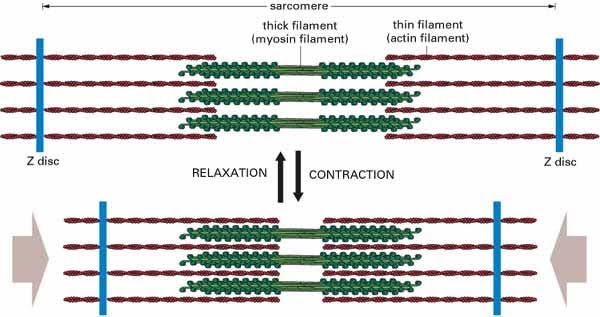
In part 1, we looked at flexibility, stability, mobility and range of motion as concepts. Each one of these concepts is the result of a muscles contractile potential. Flexibility is the ability of a muscle to achieve a fully shortened or fully lengthened orientation through a range of motion. In the fully lengthened position the orientation of the filaments is the longest and the actin and myosin are furthest apart. The further apart the actin and myosin, the longer it will take for them to reach a fully shortened position – more distance to cover, more time to contraction. The longer it takes to contract, the less power can be produced during a contraction (assuming force is equal). This means that the more flexible a muscle, the less power can be produced, which is NOT optimal if you are a power lifter.
The closer the actin and myosin orientation to a contracted position, the more power can be produced, but the draw back is that the range of motion is less. This refers to the stability of a muscle, or the resistance to change in length. Flexibility needs to be optimal and appropriate to the application and it needs to be balances with optimal stability. Fiber orientation needs to allow for proper ROM, while providing the shortest time to full contraction.

Muscles do not act alone; they work in a beautifully controlled symphony. Watching a perfectly executed movement is like listening to an orchestra when all the instruments are playing their parts perfectly. This is mobility – a balance between stability and flexibility within one or multiple joint systems. Let us use the knee in the squat as an example. During the eccentric phase of the squat, there needs to be optimal stability in the hamstring and quads to control the descent, although in an ideal situation, the hamstrings should take the brunt of the load. The hip flexor needs to be flexible above parallel and then stable below parallel. The quads need to be stable throughout. The calves need to be flexible to allow forward travel of the knee, but stable enough to maintain foot contact with the floor. Once the lifter has reached appropriate depth, the quads contract to drive the knee back to the midline, and once above parallel, the hamstrings contract to act on the hip. Sequencing of these movements will depend on squat style, lifter leverages etc., but it must be orchestrated in a perfect manner to achieve the desired result – standing up.

Balancing stability and flexibility between the musculature within a system is important. Using the above example, if the hamstrings are too stable, or rigid, the knee will be forced to travel forward to maintain a neutral pelvis. If the knee travels forward, and the calf lacks compensatory flexibility, the lifter will not be able to reach appropriate depth. The reverse is also true, if the hamstring is too flexible, the lifter will not be able to control depth and will not be able to reverse the squat out of the hole.
While it is important to understand that an individual muscle contracts as a result of the sliding filament theory, and that the filament orientation within each muscle will impact is stability, or flexibility, we must appreciate that unless the flexibility and stability of the musculature within a joint system is balanced, optimal movement cannot occur. In the next installment, we will discuss the neurological implications. As we know, the central nervous system controls our movement from a coordination standpoint, but it also influences the mechanical properties as well. Stay tuned!
Get the 10/20/Life E book HERE!
Paul Oneid
Latest posts by Paul Oneid (see all)
- A Proposition for a Paradigm of Planning Your Personal Periodization - March 4, 2019
- Paul Oneid –> Off-Season | Feet Up Bench PR and Some Squats - March 1, 2019
- Paul Oneid –> Off-Season | A bit of everything - February 21, 2019

Sorry, the comment form is closed at this time.